



最新產(chǎn)品
我們一直對(duì)產(chǎn)品進(jìn)行更新迭代,優(yōu)化結(jié)構(gòu)設(shè)計(jì),打造出更科學(xué)、更可靠的回轉(zhuǎn)驅(qū)動(dòng)裝置。
-
傳動(dòng)回轉(zhuǎn)驅(qū)動(dòng)") 拓展中心距且兼顧精度的兩級(jí)傳動(dòng)回轉(zhuǎn)驅(qū)動(dòng)
拓展中心距且兼顧精度的兩級(jí)傳動(dòng)回轉(zhuǎn)驅(qū)動(dòng)針對(duì)客戶(hù)在自動(dòng)化設(shè)備上對(duì)回轉(zhuǎn)驅(qū)動(dòng)的特殊需求,不二傳動(dòng)通過(guò)深度溝通與技術(shù)攻關(guān),成功研發(fā)出一款滿(mǎn)足 “增大中心距且高精度保...
查看詳細(xì)說(shuō)明 聯(lián)系咨詢(xún) -
高轉(zhuǎn)速回轉(zhuǎn)驅(qū)動(dòng)的輕量化設(shè)計(jì)與性能表現(xiàn)") 不二傳動(dòng)高轉(zhuǎn)速回轉(zhuǎn)驅(qū)動(dòng)的輕量化設(shè)計(jì)與性能表現(xiàn)
不二傳動(dòng)高轉(zhuǎn)速回轉(zhuǎn)驅(qū)動(dòng)的輕量化設(shè)計(jì)與性能表現(xiàn)在高轉(zhuǎn)速自動(dòng)化機(jī)械設(shè)備領(lǐng)域,設(shè)備對(duì)核心驅(qū)動(dòng)部件的性能與輕量化需求日益嚴(yán)苛。不二傳動(dòng)深入洞察客戶(hù)對(duì) “高轉(zhuǎn)速” 與 “輕重量”...
查看詳細(xì)說(shuō)明 聯(lián)系咨詢(xún) -
齒式回轉(zhuǎn)驅(qū)動(dòng):重型自動(dòng)化設(shè)備的緊湊高效解決方案")
齒式回轉(zhuǎn)驅(qū)動(dòng):重型自動(dòng)化設(shè)備的緊湊高效解決方案") 內(nèi)齒式回轉(zhuǎn)驅(qū)動(dòng):重型自動(dòng)化設(shè)備的緊湊高效解...
內(nèi)齒式回轉(zhuǎn)驅(qū)動(dòng):重型自動(dòng)化設(shè)備的緊湊高效解...在重型自動(dòng)化設(shè)備旋轉(zhuǎn)底座的應(yīng)用場(chǎng)景中,面對(duì)大載荷、安裝空間受限、高溫多粉塵等嚴(yán)苛要求,不二傳動(dòng)的設(shè)計(jì)工程師通過(guò)與客戶(hù)...
查看詳細(xì)說(shuō)明 聯(lián)系咨詢(xún) -
化旋轉(zhuǎn)設(shè)備專(zhuān)用回轉(zhuǎn)驅(qū)動(dòng)解決方案") 重型自動(dòng)化旋轉(zhuǎn)設(shè)備專(zhuān)用回轉(zhuǎn)驅(qū)動(dòng)解決方案
重型自動(dòng)化旋轉(zhuǎn)設(shè)備專(zhuān)用回轉(zhuǎn)驅(qū)動(dòng)解決方案針對(duì)重型自動(dòng)化旋轉(zhuǎn)設(shè)備的特殊工況需求,不二傳動(dòng)憑借深厚的非標(biāo)設(shè)計(jì)經(jīng)驗(yàn),量身打造了一款高性能回轉(zhuǎn)驅(qū)動(dòng)產(chǎn)品,完美平衡了空...
查看詳細(xì)說(shuō)明 聯(lián)系咨詢(xún)
簡(jiǎn)析自動(dòng)化設(shè)備應(yīng)用中的回轉(zhuǎn)驅(qū)動(dòng)齒間隙
發(fā)布時(shí)間:2024/05/07 企業(yè)新聞 瀏覽次數(shù):3675
我們一直在追求靈活、高性能和更加經(jīng)濟(jì)的傳動(dòng)系統(tǒng)
齒輪齒隙是指機(jī)械傳動(dòng)系統(tǒng)中齒輪的齒之間存在的間隙,如圖 1 所示。由于齒輪間隙會(huì)影響精度、效率、噪音、振動(dòng)、磨損、運(yùn)動(dòng)控制、系統(tǒng)復(fù)雜性和安全性,因此我們一直在努力將回轉(zhuǎn)驅(qū)動(dòng)中齒輪系統(tǒng)的間隙降至最低。盡管齒間隙的重要性因具體應(yīng)用場(chǎng)所而異,但我們?cè)谠O(shè)計(jì)齒輪式回轉(zhuǎn)驅(qū)動(dòng)的時(shí)候,仍需仔細(xì)考慮這些因素,確保它們達(dá)到所需的性能和安全標(biāo)準(zhǔn)。
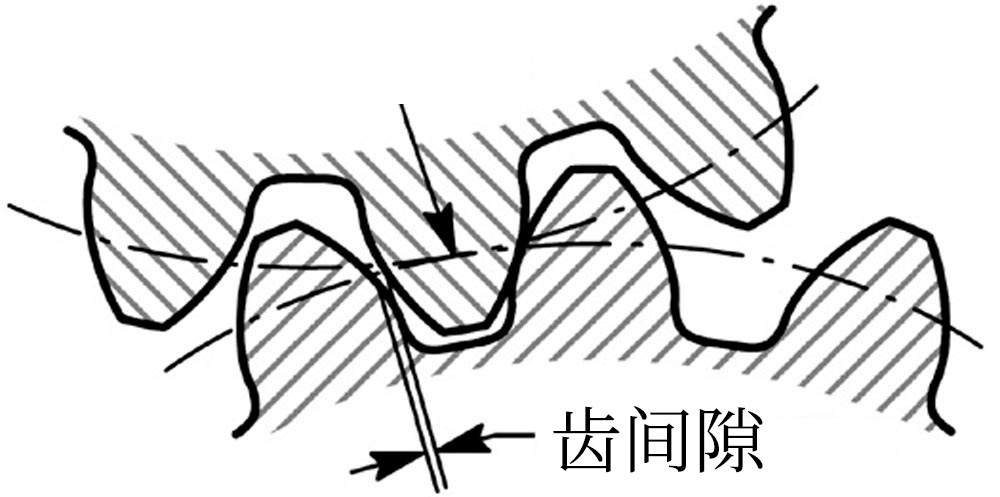
圖1:齒間隙示意
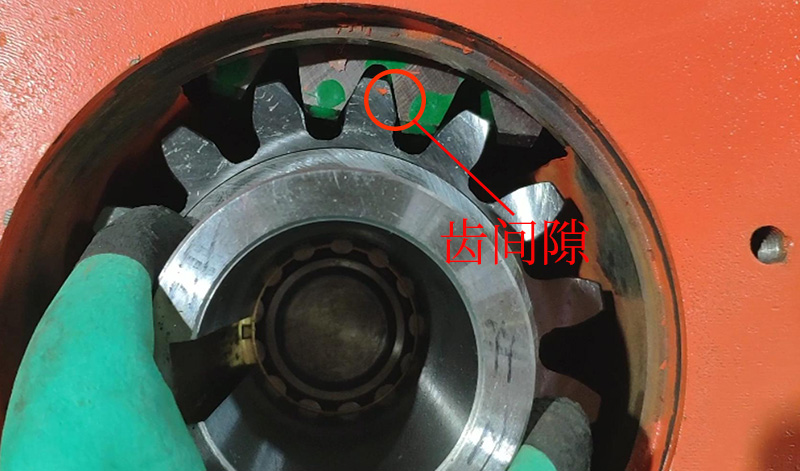
圖2:實(shí)際應(yīng)用中的齒間隙
精度和準(zhǔn)確性
在工業(yè)機(jī)器人、數(shù)控機(jī)床以及自動(dòng)化生產(chǎn)線設(shè)備等高精度應(yīng)用中,最大限度地減少回轉(zhuǎn)驅(qū)動(dòng)的齒隙至關(guān)重要。過(guò)大的齒隙會(huì)產(chǎn)生定位不準(zhǔn)確、重復(fù)性的準(zhǔn)確度降低等問(wèn)題,這可能會(huì)導(dǎo)致無(wú)法生產(chǎn)出公差要求嚴(yán)格的產(chǎn)品。
效率和滯后
扭轉(zhuǎn)剛度和齒隙決定了齒輪在負(fù)載和不負(fù)載之間的表面接觸面積,這種現(xiàn)象被稱(chēng)為滯后。一般來(lái)說(shuō),滯后是指系統(tǒng)在改變方向時(shí)輸入和輸出之間的滯后。如果制造商無(wú)法提供這些滯后曲線,則可使用損失運(yùn)動(dòng)和剛度變化作為替代參數(shù)來(lái)評(píng)估齒輪箱的滯后現(xiàn)象。
振蕩和振動(dòng)
回轉(zhuǎn)驅(qū)動(dòng)的反向間隙會(huì)導(dǎo)致自動(dòng)化生產(chǎn)線設(shè)備系統(tǒng)出現(xiàn)振蕩和振動(dòng),尤其是當(dāng)設(shè)備突然改變方向或停止和啟動(dòng)時(shí),這些振動(dòng)會(huì)影響系統(tǒng)的整體穩(wěn)定性及其處理精細(xì)任務(wù)的能力。
磨損
隨著時(shí)間的推移,齒輪間隙會(huì)導(dǎo)致回轉(zhuǎn)驅(qū)動(dòng)的齒輪部件磨損加劇,縮短設(shè)備的使用壽命,并可能導(dǎo)致維護(hù)問(wèn)題。
控制和制造復(fù)雜性
控制算法中的反向間隙補(bǔ)償很復(fù)雜,可能需要額外的傳感器和軟件來(lái)考慮機(jī)械間隙。這增加了控制系統(tǒng)的復(fù)雜性。此外,追求接近零的反向間隙也增加了設(shè)計(jì)的復(fù)雜性和齒輪式回轉(zhuǎn)驅(qū)動(dòng)的成本。
位置控制
位置控制是一些自動(dòng)化設(shè)備的基本需求,它涉及準(zhǔn)確可靠地控制自動(dòng)化設(shè)備某些部件的位置。反向間隙會(huì)導(dǎo)致部件應(yīng)在的位置與實(shí)際位置之間出現(xiàn)偏差。在許多自動(dòng)化設(shè)備應(yīng)用中,精確定位對(duì)于成功執(zhí)行任務(wù)至關(guān)重要。比如抓取拾放操作、焊接、裝配等任務(wù),位置控制不佳會(huì)導(dǎo)致任務(wù)執(zhí)行錯(cuò)誤。
根據(jù)運(yùn)動(dòng)方向的不同,齒輪的反向間隙可能會(huì)導(dǎo)致輸出側(cè)的負(fù)載位置不同,從而在運(yùn)動(dòng)開(kāi)始或停止時(shí)造成延遲和振蕩。首先想到的解決方案是在齒輪輸出軸上安裝第二個(gè)編碼器,并將控制建立在雙反饋回路的基礎(chǔ)上,從而增加復(fù)雜性和誤差補(bǔ)償。控制器首先關(guān)閉內(nèi)環(huán),即速度控制環(huán),然后關(guān)閉第二個(gè)負(fù)載位置環(huán),速度控制環(huán)路接收來(lái)自電機(jī)編碼器的反饋,該反饋決定適當(dāng)?shù)乃俣确答佋鲆妫瑥亩鴮?duì)系統(tǒng)產(chǎn)生阻尼效應(yīng),減少振蕩。
安全性
安全性是自動(dòng)化設(shè)備的首要問(wèn)題,準(zhǔn)確的位置控制可確保自動(dòng)化設(shè)備在規(guī)定的工作空間內(nèi)運(yùn)行,避免碰撞或事故。比如,與人一起工作的機(jī)器人就需要靈活的位置控制,確保不會(huì)對(duì)操作員構(gòu)成安全風(fēng)險(xiǎn)。因此,反向驅(qū)動(dòng)能力(即低阻抗系統(tǒng))對(duì)于從負(fù)載側(cè)驅(qū)動(dòng)機(jī)械遵從性、管理與人的接觸至關(guān)重要。
結(jié)論
回轉(zhuǎn)驅(qū)動(dòng)中的齒輪反向間隙會(huì)導(dǎo)致位置控制環(huán)節(jié)中出現(xiàn)誤差,從而影響自動(dòng)化設(shè)備的機(jī)械阻抗、產(chǎn)生噪音、降低效率并引起振動(dòng)。由于材料、潤(rùn)滑劑和環(huán)境條件的磨損,反向間隙范圍會(huì)隨著時(shí)間的推移而變化。
- 斜齒輪螺旋角對(duì)回轉(zhuǎn)驅(qū)動(dòng)傳動(dòng)性能的影響
- 聚焦高性能回轉(zhuǎn)驅(qū)動(dòng):國(guó)內(nèi)外關(guān)鍵技術(shù)發(fā)展全景...
- 回轉(zhuǎn)驅(qū)動(dòng)傳動(dòng)軸的連接方式簡(jiǎn)介
- 回轉(zhuǎn)支承軸承溝道淬火后該怎樣加工?
- 怎樣才能增加回轉(zhuǎn)支承的使用壽命?
- 如何提高回轉(zhuǎn)驅(qū)動(dòng)中蝸輪蝸桿的扭矩
- 回轉(zhuǎn)驅(qū)動(dòng)選用花鍵連接的優(yōu)點(diǎn)
- 齒輪式回轉(zhuǎn)驅(qū)動(dòng)安裝使用說(shuō)明書(shū)

